2025 年 4 月 4 日
- 德國航空航天中心與計畫參與者一起在布倫瑞克的托斯特曼廣場安裝了兩根感測器柱,以分析交通狀況。
- 不儲存個人資料。
- 在 MAD Urban 計畫中,研究人員透過早期檢測關鍵交通狀況來提高自動駕駛汽車的安全性。
- 他們正在測試各種感測器,以便即使在能見度差和天氣惡劣的情況下也能更好地監控交通狀況。
- 研究人員還正在開發數位孿生,以便更有效地控制交通並直接透過道路技術實現自動駕駛汽車。
- 重點:交通、數位化、自動化和網聯駕駛
2025年4月3日,德國航空航天中心(DLR)和計畫參與者在布倫瑞克北部的Tostmannplatz安裝了兩根感測器柱。這些看起來很像“測速攝影機柱”,但不適合速度控制。相反,它們包含許多不同的感測器和計算機,用於研究目的記錄和分析交通情況。嚴格遵守資料保護規定。這些支柱不會收集或儲存任何個人資料。
新型感測器柱確保道路安全
德國航太中心將從 2025 年 4 月起在德國聯邦經濟和氣候保護部 (BMWK) 資助的 MAD(託管自動駕駛)城市研究計畫中使用這兩列感測器。有多家公司和研究機構參與其中:卡爾斯魯厄資訊技術研究中心 (FZI)、英特爾、GFT、巴魯夫和 Vitronic。
德國航空航天中心交通系統研究所技術項目經理朱利安·辛德勒 (Julian Schindler) 在解釋這些支柱的用途時表示:“自動駕駛汽車已經比人類駕駛員具有巨大的優勢,因為它們可以同時‘看’不同的方向。” “然而,在很多情況下,這還不夠。車輛、行人或自行車的人經常被其他車輛、交通標誌或航天灌木叢正在與不倫瑞克市密切合作,擴大位於托斯特曼廣場的下薩克森州測試場,並在 MAD Urban 項目中測試安裝在街道不同位置的各種類型的傳感器。目標是讓自動駕駛汽車能夠在附加感測器的幫助下儘早檢測到危急情況。在該計畫中,研究人員還將研究各自的感測器在不同情況和天氣條件下分析交通狀況的適應程度。
智慧交通管制試驗項目
在 MAD Urban 計畫中,科學家將駕駛車輛從 DLR 和 FZI 穿過托斯特曼廣場,同時使用感測器柱來支持感知。此外,有關最合適速度和車道的駕駛建議也將傳遞給自動駕駛汽車。研究人員還希望在全球範圍內首次測試道路技術對這些車輛的完全控制。為此,計畫參與者將結合各個感測器的數據,全面了解路口所有道路使用者和障礙物的情況。這就產生了所謂的“數位孿生”,即電腦中的世界圖像。未來,城市可以利用這一點更有效地管理交通,例如調整交通號誌以適應相應的交通狀況。
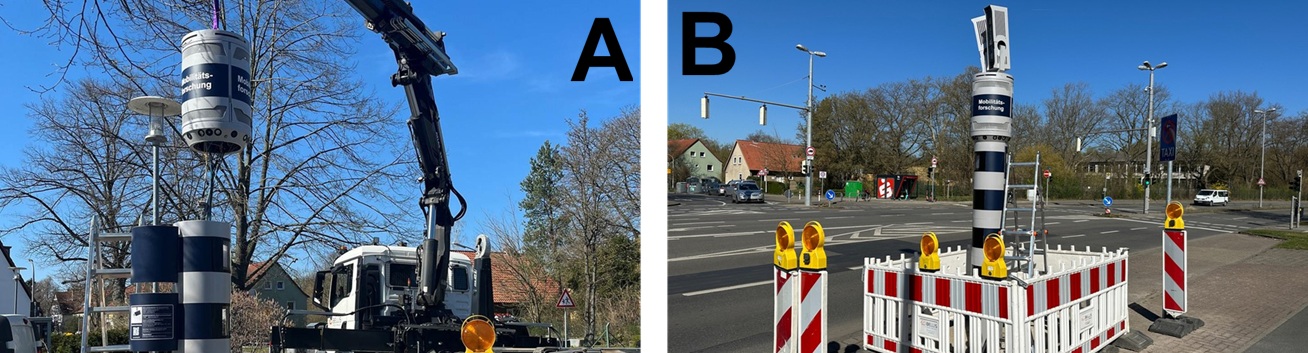
[照片]
(A) MAD Urban 感測器柱
位於布倫瑞克托斯特曼廣場的新感測器柱將來會用於分析交通狀況。不會收集或儲存個人資料。
(B) 布瑞克托斯特曼廣場的 MAD Urban 專欄
在 MAD Urban 計畫中,研究人員透過早期檢測關鍵交通狀況來提高自動駕駛汽車的安全性。