2024 年 1 月 25 日
- 瑞典歐空局太空人馬庫斯·旺特從國際太空站控制地球上的各種機器人系統,進行「表面阿凡達」實驗。
- 透過實驗,研究人員希望了解時間延遲如何影響機器人的遠端控制。
- 焦點:太空旅行、探索、月球、火星、國際太空站
位於奧伯普法芬霍芬的德國航空航天中心 (DLR) 的火星實驗室一片寂靜——與國際太空站國際太空站的連接已建立。「表面阿凡達」實驗已獲得批准,瑞典歐空局太空人馬庫斯·旺特正在哥倫布模組中指揮陸地火星實驗室總共三個機器人中的第一個。除了2023 年 7 月的實驗外,開發人員還測試了時間延遲如何影響太空任務期間機器人的控制。未來,協作智慧機器人將支援太空旅行者執行月球或火星探索任務。
研究小組正在開發新技術,使一個人能夠靈敏地控制多個機器人,讓它們部分或完全自主地行動,並讓不同的機器人一起執行任務。Surface Avatar計畫由DLR機器人和機電一體化研究所領導,並與歐洲太空總署ESA和德國太空營運中心GSOC合作。
全球首發,團隊合作挑戰
在新的、更複雜的實驗裝置中,四足DLR 機器人 Bert首次加入,標誌著遠端機器人領域的世界首次。到目前為止,只有輪式動力機器人能夠被太空人從太空遠端控制。伯特可以掌握多種步態。他的腿部運動使他能夠探索崎嶇的地形,包括他滾動的隊友無法到達的小洞穴。歐空局太空人馬庫斯·萬特讓這位四足朋友探索該地區,並用他的相機眼睛監視該地區。有了 Bert 在後台「持續」提供的信息,Wandt 轉向了其他機器人:來自 DLR 的人形服務機器人 Rollin' Justin 和來自 ESA 的 Interact Rover。
即使在人與人之間,協作也是一件複雜的事。必須達成協議並且必須理解相互的意圖。當不同的機器人組成一個團隊並且必須共同成功完成一項任務時,這是一個特殊的挑戰。例如,在建造棲息地時,結合多個機器人的不同技能非常有幫助。在第一個此類實驗中,德國太空中心的人形機器人 Rollin' Justin 和歐空局的 Interact Rover 完成了任務,並共同安裝了一根代表科學測量裝置的短管。在太空人萬特的指揮下,羅林賈斯汀用他熟練的雙手牢牢地抓住了管道並將其操縱到測量地點。然後,萬特使用 Interact Rover 的遙控器來安裝賈斯汀固定的管道。
尖端空間研究
「未來的月球和火星站,包括太空人的棲息地,將由在太空人指導下操作的機器人建造和維護。我們最新的控制和人工智慧演算法使一個人能夠指揮整個不同機器人團隊。憑藉這項技術,我們的 DLR-ESA 團隊處於世界領先地位。” Alin Albu-Schäffer,DLR 機器人與機電整合研究所所長。
為了讓研究人員能夠在兩個半小時內專注於機器人團隊執行的科學任務和維護場景,位於奧伯普法芬霍芬的哥倫布控制中心密切關注國際太空站上的其他活動,並確保可靠運作。「表面阿凡達」是歐空局太空人馬庫斯·旺特在其 Axiom 太空任務Muninn中進行的總共十項德國實驗之一。
[照片]
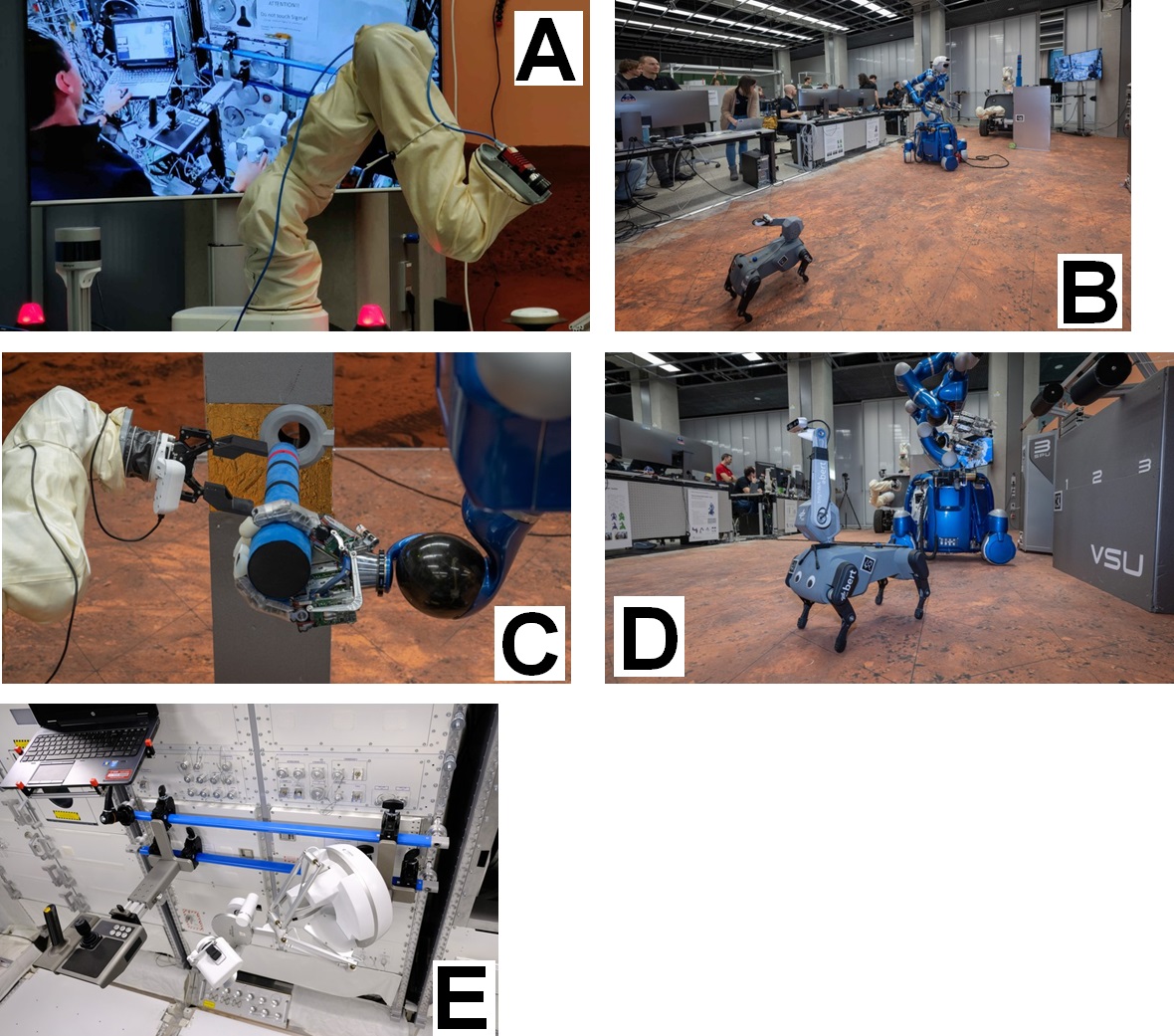
(A) 歐空局太空人馬庫斯·萬特從太空控制機械手臂
在「表面阿凡達」實驗中,瑞典太空人馬庫斯·旺特指揮國際太空站(ISS)的各種機器人系統。
(B) 人類和機器人已準備好:「地表阿凡達」的新實驗
遠端機器人實驗系列「表面阿凡達」特別致力於進一步開發協作機器人來支援太空人。在國際太空站國際太空站上,一名機組人員在位於上普法芬霍芬的 DLR 陸地火星實驗室中控制一組機器人。該計畫由德國太空中心機器人與機電一體化研究所牽頭,與歐洲太空總署(ESA)和德國太空營運中心合作。
(C) 機器人團隊合作:互動 Rover 和 Rollin' Justin
兩個智慧機器人的成功合作:歐空局的 Interact Rover 和 DLR 機器人 Rollin' Justin 共同安裝了代表科學測量裝置的短管。 這項任務是由歐空局太空人馬庫斯·萬特(Marcus Wandt)協調的,他在國際太空站上控制位於上普法芬霍芬的 DLR 火星實驗室的機器人團隊。
(D) DLR 機器人 Bert 監控現場
四足 DLR 機器人 Bert 探索並監視外部環境。 表面阿凡達實驗正在測試未來火星和月球探索任務的重要場景。 Bert 正在 DLR 機器人和機電一體化研究所進行開發,它可以行走、小跑、慢跑、掌握傳球甚至攀爬。 這使得它能夠覆蓋很長的距離,同時穿過崎嶇的地形或小洞穴。
(E) 機器人命令終端:國際太空站上的控制設備
用於表面阿凡達實驗的機器人命令終端位於國際太空站(ISS)的哥倫布艙內。除了具有圖形使用者介面的筆記型電腦之外,還可以透過兩個輸入站來命令機器人:ESA 太空人 Marcus Wandt 可以使用 sigma 操縱桿(左)直觀地控制各種機器人的移動和觀察方向。使用互動設備(右),您可以像控制自己的手臂一樣控制機器人的手臂。控制有七個自由度調節,因此動作感覺非常自然。借助內建的力回饋,太空人可以透過機器人觸摸或抓住某物時感受到相應的阻力來感受機器人的「感覺」。