2024 年 6 月 25 日
- 在 2024 年 6 月 25 日的 AHEAD 專案演示期間,一輛 SHERP 越野車透過崎嶇的地形和湖泊進行半自動遠端控制。
- 在 AHEAD 計畫中,德國太空中心和合作夥伴正在開發用於人道援助和救災的技術。美因河畔諾德海姆的研究人員與聯合國世界糧食計劃署 (WFP) 和巴伐利亞紅十字會 (BRK) 測試了兩種操作方案。
- 重點:人道援助、救災、地球觀測、太空旅行
在 2024 年 6 月 25 日的現場演示中,AHEAD(自主人道主義緊急援助設備)計畫展示了用於人道主義援助和災害控制的高科技。德國航空航天中心 (DLR) 正在與合作夥伴合作,開發用於進入難以到達區域的遙控無人駕駛運輸車輛的技術和功能。越野車到達船隻或公路車輛無法通行或對人來說太危險的地方。其目的是在緊急服務無法自行管理的情況下支持人道援助和救災。
使用者和決策者“參與其中”
在與聯合國世界糧食計劃署 (WFP) 和巴伐利亞紅十字會 (BRK) 的特別合作中,AHEAD 團隊模擬了兩個現實場景:根據南蘇丹目前的行動進行食品運送,以及援助和救援行動洪水情況與2021 年阿爾河谷以及最近德國南部的情況類似。 BRK 的多個特種部隊和 20 多個緊急服務部門參與了洪水應變工作。
位於美因河畔諾德海姆的聯邦國防軍訓練區為計畫團隊提供了理想的條件——廣闊、無法通行且植被茂密的地形,其中包括一個陡峭的湖岸。半自動遙控「SHERP」車輛首次展示了其游泳能力。 SHERP 特別適合越野使用,並且已被世界糧食計劃署用於運送援助物資,儘管傳統上仍由司機負責駕駛。由於駕駛員面臨巨大的危險,例如攜帶疾病的昆蟲、流行病或地雷,因此 SHERP 卡車將來應該能夠使用遠端機器人手段進行遠端控制。
「用於驗證我們技術的 AHEAD 演示非常複雜,因為不同的團隊和技術組件必須一起工作。我們非常高興和自豪,經過四年的研究,首次在崎嶇地形和水中成功遙控操作 SHERP 車輛。強烈的團隊精神對我來說是一次特別的經驗。 「每個人都在共同努力,將研究結果付諸應用並推進研究,」計畫總負責人 Dr.來自 DLR 機器人和機電一體化研究所的 Armin Wedler。
此次演示是為期三天的專案研討會的一部分。除了研究人員、最終用戶和決策者之外,巴伐利亞經濟事務、區域發展和能源國務秘書 Tobias Gotthardt 作為特邀嘉賓參加了會議。他親眼目睹了 AHEAD 技術的可能應用:「專案合作夥伴在 DLR 的全面管理下所創造的成果令人印象深刻。它再次展示了人工智慧、自動駕駛和太空技術的可能應用是多麼多樣化。我特別高興的是,我們能夠透過巴伐利亞州對兩個合作夥伴計畫的資助,為災害保護和人道主義援助做出貢獻。當太空技術幫助我們的世界變得更美好時,這是雙重用途的最高成就。
全球營運和響應能力
為了讓 SHERP 特種車輛完成任務,需要多個操作單元協同工作。全球任務控制中心 (GMOC) 規劃並監控遠端卡車任務,由 DLR 地球觀測中心的衛星危機資訊中心 (ZKI) 實施。為了確定環境和最佳路線,控制中心收集並評估遙感數據,例如高解析度衛星影像、空拍照片和無人機鏡頭。這些單位以情況報告和互動式網路應用程式的形式在現場接收結果。在未來的營運中,GMOC 將成為一個永久性總部,可以支援全球營運。為了在諾德海姆進行演示,團隊將總部設立在測試場地的一個單獨地點,看不到正在發生的情況。
本地任務控制中心(LMOC)設置在部署地點的移動貨櫃內。它連接到 GMOC 並遠端操作卡車。考慮到即時數據,遠端控制沿著預先規劃的路線進行。車輛配備了感測器和立體攝影機。它持續傳輸其位置和 360 度環境資料。這意味著LMOC中的駕駛者可以安全地避開狹窄通道和意外障礙物等危險。
隨時靈敏遙控
為了遠端控制車輛,需要一個人坐在輸入站前,該輸入站具有燈光、喇叭、變速桿和腳踏板等功能。她可以直觀地引導 SHERP,並且藉助力回饋,感受車輛在地形上的行為。遠端機器人技術來自太空研究,並正在 AHEAD 中進一步開發,用於地球上的人道主義援助和危機行動。
為了進行持續的資料交換,兩個控制中心和車輛透過多種通訊系統相互連接,特別是行動通訊、衛星通訊和寬頻網路。 LMOC 也透過本地無線電連接到車輛。德國航太中心通訊與導航研究所在此貢獻其專業知識。研究人員提前計算了路線規劃的通訊可用性,以確保整個任務期間的通訊。此外,還確保並驗證了 LMOC 和車輛之間穩健且安全的通訊。
與用戶和產業的合作
隨著現場演示的成功,AHEAD 在使技術可供使用方面又邁出了重要的一步。 DLR 的兩家衍生公司 Sensodrive 和 Roboception 已經展示瞭如何成功地進行研究成果轉換。他們是該計畫的工業合作夥伴之一,憑藉遠端機器人和感知領域的解決方案在市場上立足。為了有針對性的開發,與巴伐利亞紅十字會和糧食計劃署等未來用戶的合作至關重要。
「今天 AHEAD 計畫的成功現場演示令人印象深刻地展示了我們如何利用創新技術使難以到達地區的人道主義行動更加高效。該計畫是創新的傑出範例,也是我們邁向無飢餓世界道路上的一個重要里程碑。
在測試場景中,AHEAD 團隊表明,自然災害和嚴重危機中的臨時行動與日常人道主義行動中預先計劃的援助任務一樣可行。專案團隊將評估現場演示期間收集的數據,以擴展功能並提高技術的使用效率。
[照片]
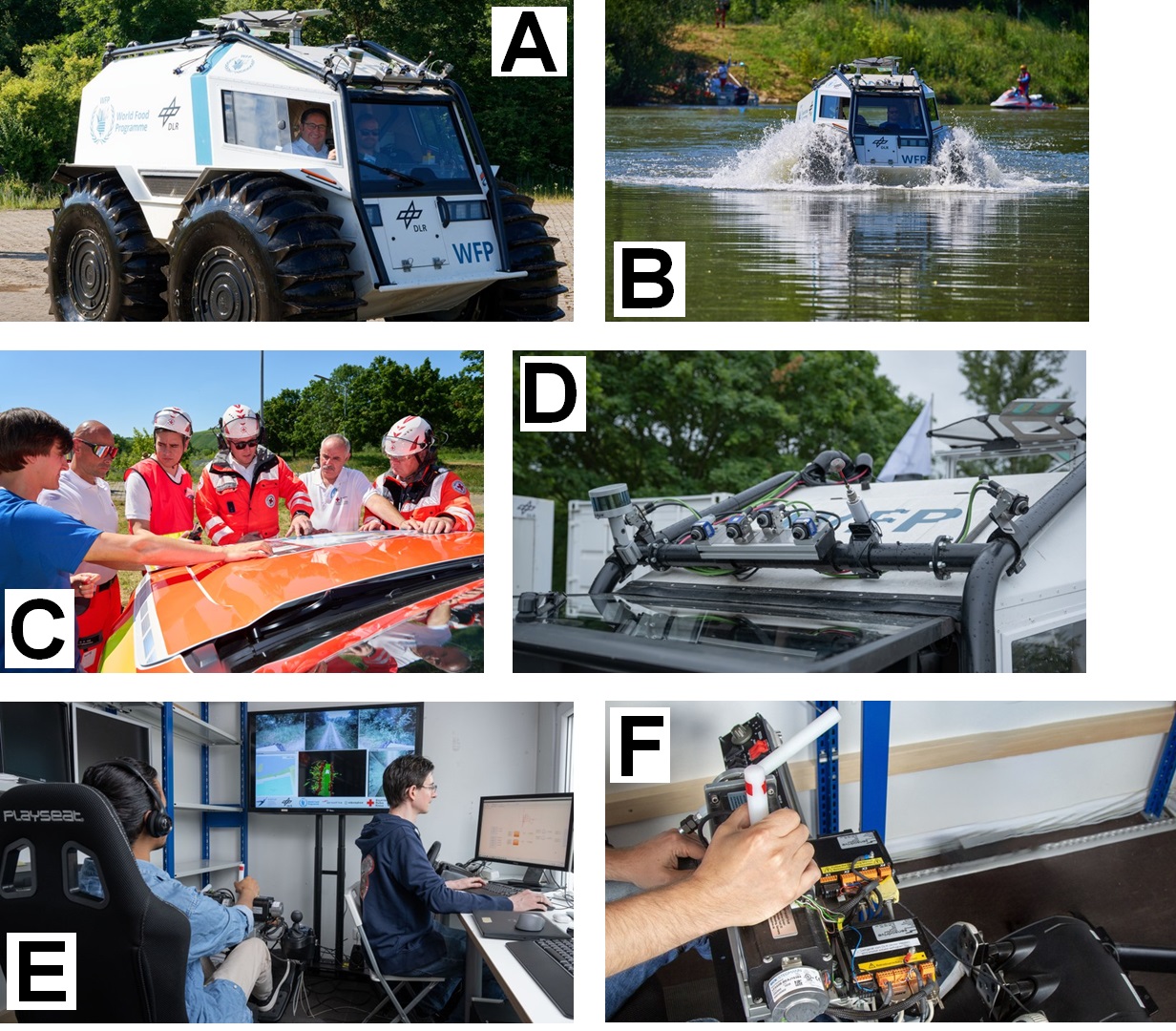
(A) 國務秘書 Tobias Gotthardt 在 AHEAD 示威活動中
2024年6月24日,巴伐利亞州經濟事務、區域發展和能源國務秘書 Tobias Gotthardt)通報了AHEAD計畫的最新進展。他對半自動控制 SHERP 車輛相關技術的演示充滿熱情。
(B) 漂浮越野車
在2024年6月25日的技術展示上,AHEAD計畫小組成功測試了SHERP車輛的遠程漂浮。這種能力對於未來洪水期間的救援行動非常重要,例如當水流對人和船隻來說太危險時。在這裡的演習期間,研究人員在車輛上進行監控,車輛繼續進行遠端控制。
(C) 營運簡報
DLR AHEAD 計畫開發的技術也將支持未來嚴重危機中的民事保護。對於救援行動,我們將建立狀況報告以提供概覽,並與當局和緊急服務部門密切協調,規劃路線並協調救援措施。在與巴伐利亞紅十字會的防洪演習中,複雜的流程以實際的方式進行。
(D) 360度全景
SHERP 車輛配備了多個立體攝影機,可提供周圍區域的 360 度視野。影像即時傳輸到當地的任務控制中心,該中心遠端控制車輛。
(E) 越野車的遠端控制
全地形 SHERP 車輛由當地任務控制中心 (LMOC) 的遠端機器人進行遠端控制。人們可以使用輸入站直觀地控制車輛,並使用力回饋靈敏地控制車輛。帶有規劃路線的地形圖以及車輛的即時記錄都顯示在監視器上。這意味著駕駛員可以隨時對駕駛環境做出反應。
(F) 遙控機器人輸入站
在AHEAD專案中,SHERP車輛經過專門改裝用於遠端操作。這使得一個人可以遠端控制越野車。使用帶有操縱桿、變速桿和腳踏板的輸入站,她可以直觀地控制車輛。透過力回饋,人們還可以感受到車輛在地形上的反應和移動。