2023 年 7 月 20 日
- 敏捷的賈斯汀感知物體並協調手的十二個關節以靈巧地操縱它們。
- 人形機器人在模擬中獨立學習。
- 智能機器人技術取得了驚人的發展。
- 重點:機器人、航空航天、工業 4.0、數字化
敏捷的賈斯汀知道如何正確地抓住物體——即使他是新手。人形機器人還可以將手中的物體轉向任何所需的方向,而無需看它。這對人類來說是司空見慣的事,但對機器人來說卻極其困難。德國航空航天中心 (DLR) 的一個團隊現已向機器人傳授這些高度複雜的技能。為此,科學家們利用學習人工智能(AI),從而實現了人工智能機器人技術的突破。
敏捷的賈斯汀的兩隻四指機械手上都有傳感器:他用它們來“感覺”物體。他最近在自動貿易展覽會上展示了他的技能。手動靈活性被認為是機器人研究人員面臨的主要挑戰。“借助學習人工智能的新方法,我們首次能夠展示機電高度發達的DLR 手的技能,其接近人類靈巧程度:特別是,張開手盲目轉動和操縱物體是一項挑戰,”上普法芬霍芬 DLR 機器人和機電一體化研究所的 Berthold Bäuml教授說道。。Berthold Bäuml 的人工智能研究多年來一直在推動人形機器人 Justin 的發展:例如,Justin 可以接住向他扔來的球,或者通過用手指掃描來識別材料。現在,自學人工智能極大地擴展了賈斯汀的可能性。
“旋轉物體很好。掉落物體是不好的”
科學家們使用所謂的深度強化學習。這意味著賈斯汀完全獨立地通過接受指示來了解什麼是對的、什麼是錯的。在該應用中,例如,“將物體轉向目標是好的”和“掉落物體是壞的”。技能機器學習一次模擬僅需兩到三個小時。然後賈斯汀就完成了任務。他通過反複試驗以與人類非常相似的方式製定手指的運動策略。“然後機器人可以直接在真實環境中實施其解決方案。作為研究人員,我們也常常感到驚訝。我們新的人工智能學習方法的可能性令人著迷。”Berthold Bäuml 說道。
數以萬計的事情有數以千計的例子
人工智能機器人技術的另一項首創也已實現:賈斯汀用他的多指手抓住任何物體。在這裡,研究人員解決了人工智能的兩個主要問題。從 50,000 個示例中,機器人學會了所謂的“基礎模型”,使其能夠從可見的正面推斷出背面的形狀。這樣賈斯汀就了解了 3D 形狀。其次,賈斯汀可以找到他的手的最佳位置,並調整他的十二個手指關節以適應。人們憑直覺抓住物體。為了向機器人傳達這種直覺,另一個人工智能被輸入了數以萬計的物體的數千個例子。“計算花了幾天時間。但現在機器人可以在不到一秒的時間內恢復正確的抓地力,” 伯特霍爾德·鮑姆爾解釋道。賈斯汀已經通過觀眾分發的物品展示了他對自動藝術的熟練程度。
“基於人工智能的熟練操縱工作代表了全球科學突破。雙手從未能夠如此快速、如此精確地操縱如此眾多的物體。只有將最新的人工智能方法與基於模型的方法和多年的機器人技術相結合,才能取得成功。”DLR 機器人和機電一體化研究所所長 Alin Albu-Schäffer 教授說道。“到目前為止,人們通常認為學習如何用機器人手操縱物體需要大量數據。與大型語言模型的數據相比,機器人技術的實驗數據,即使是通過模擬生成的,也非常昂貴。DLR 研究團隊現在找到了一種需要更少數據的方法,通過使用更多的機器人知識和新的學習架構。這樣,團隊甚至可以在簡單的計算機上訓練這些模型,而不需要大型集群。”
工業生產和護理的機會
機器人技術的下一個重大進步可能是工業製造。如果多指機械手默認掌握靈活、智能的操作,它們就可以組裝非常複雜和小的零件。DLR 研究人員正在致力於此,例如,在SmartHand項目中。
機器人助手也是護理領域的一個問題。未來,他們可以減輕護理人員的負擔,讓殘疾人在日常生活中獲得更大程度的獨立性。DLR 開發的智能操作技能也是這一點的基礎。例如,這適用於牢固地抓握杯子、碗、盒子或其他各種形狀的家用物品。
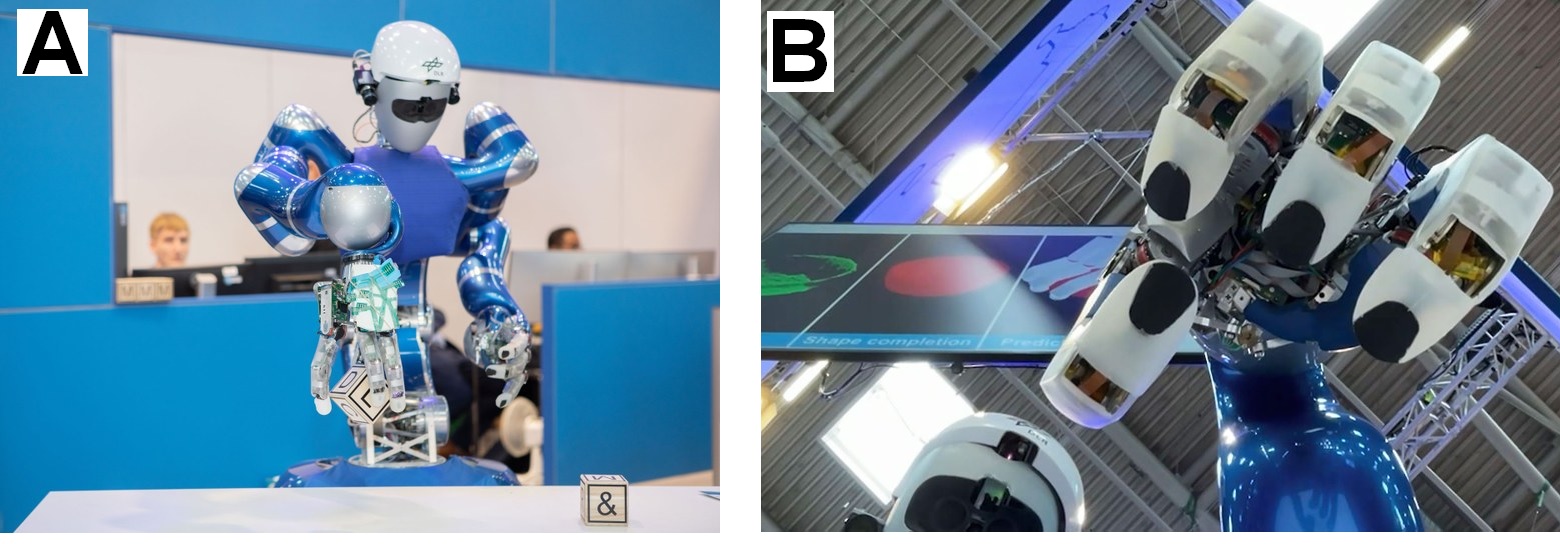
[照片]
(A) 機器人像人類一樣直觀地抓取和移動物體
(B) 機器人的四只抓物。