2025 年 2 月 27 日
- DLR概念使協作機器人能夠靈活地避開障礙物,而無需像被機械彈簧那樣被迫回到原來的位置。
- 機器的靈活性是指機器不能僵硬地站立在空間中,而是能夠靈活地根據環境條件調整其位置的能力。
- 合規性和適應性的進步提高了機器人的安全性和有效性,並加速了其融入日常生活。
- 重點:太空旅行、太空研究和護理中的機器人技術
機器人在人類環境中的使用正在迅速增加。這使得這些機器的靈活性作為關鍵的安全特性變得更加重要。這種靈活適應環境的能力決定了操作的順利進行和與附近的人發生碰撞等潛在危險。在所謂的協作機器人(與人類密切合作的協作機器人)領域,德國航空航天中心 (DLR) 已成為先驅者。目前此項開發的目標是:機器人能夠像機械彈簧一樣朝所需位置移動。然而,彈簧總是會回到原來的位置。目前,德國航空航天中心的研究人員在《科學機器人》雜誌上提出了一個更先進的概念。他們的方法可以讓機器人靈活地避開障礙物,而不需要像彈簧一樣回到原來的狀態;這種行為與人類在需要共同執行實際任務時的行為類似——一個人發號施令,另一個人保持靈活順從。
博士德國航空航天中心機器人與機電一體化研究所的科學家 Michael Panzirsch 解釋說:「新的彈塑性方法使人類和機器人之間的合作變得更加容易,因為機器人現在可以清楚地區分其運動是源於自身的命令還是受到移動環境的影響。機器人應該對這種環境的影響做出塑性反應,即避開它並停在原地。
此外,創新控制器通常可以簡化與表現出複雜運動的物體的互動的可能性。例如,只有繞軸旋轉門才能打開。機器人幾乎自動地遵循正確的運動方向,即繞控制器控制的軸旋轉,而不需要額外的門模型。這就像一個人閉著眼睛開門,只拉一下門把手,就會自動以塑性的方式適應圓形路徑。
在空間研究和護理的應用
德國航空航天中心機器人與機電一體化研究所幾十年來一直在研究敏感機器人。該公司開發了第一款機械手臂,該手臂因其出色的靈活性而從傳統剛性工業機器人中脫穎而出。彈塑性控制方法於 2024 年 1 月在太空任務中成功測試。表面化身專案系列研究了行星表面上幾個基於機器人的化身的遠端操作。這裡的重點是能夠執行協作任務的異質機器人團隊的成功協作。 「我們的控制器首次實現了歐洲太空總署 (ESA) 人機互動實驗室的探測車與國際太空站 (ISS) 太空人控制的人形 DLR 機器人之間的合作,」Dr. 解釋。 Neal Y. Lii,表面化身計畫的科學主任。
但該技術的多功能性不僅體現在太空領域。在護理領域,彈塑性調節器被證明是一種有價值的工具。在 SMiLE 專案系列(為生活狀況受限人士提供服務機器人)中,DLR 的 Jörn Vogel 等研究人員正在開發輔助系統概念,旨在為身體有障礙的人和需要照顧的人提供有效的日常生活支援。彈塑性控制器不僅有利於人與機器人的合作,還能讓機器人自動進入從屬角色,而無需額外的複雜感測器。
機器人技術的進步,特別是在合規性和適應性方面的進步,不僅加速了機器人融入日常生活,而且提高了其安全性和有效性。在未來,人類和機器將更加緊密地合作,至關重要的是,這些機器不僅要做出反應,還要理解——並且以滿足人類需求和特點並以人類能力為模型的方式來做到這一點。
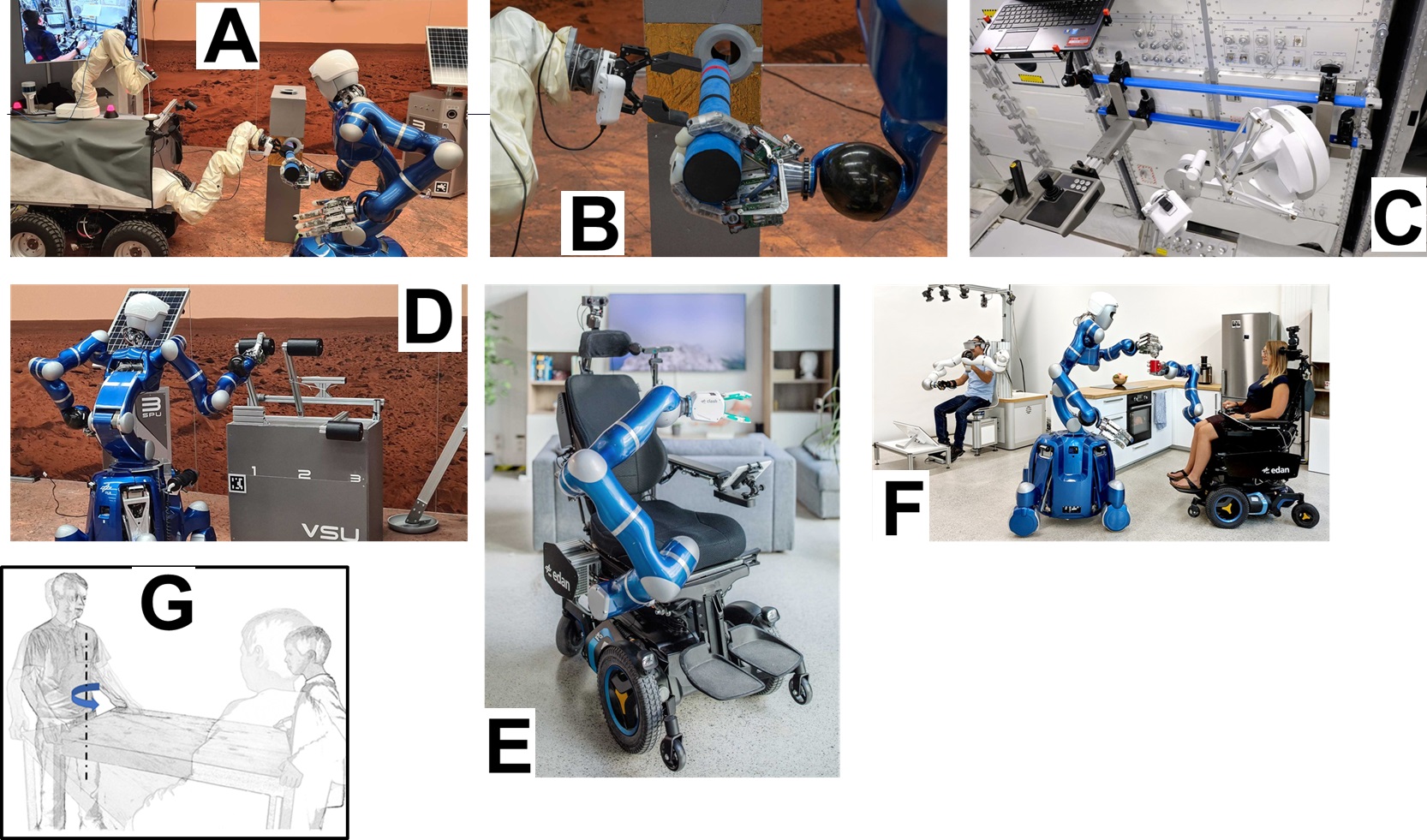
[照片]
(A) 從國際太空站遠端控制:DLR 機器人 Rollin' Justin 與 ESA 探測車交互
自主人形 DLR 機器人 Rollin' Justin(右)與 ESA 探測器 Interact(左)由國際太空站 ISS 控制。他們合作操作一個工具。
(B) 兩隻機械手協作工具
當人形 DLR 機器人的手臂(右)獨立攜帶物體時,太空人從國際太空站控制 ESA 探測器 Interact(左)的手臂。太空人引導物體到達目標位置。新方法讓人形機器人能夠保持物體的旋轉,但在平移時卻表現得特別柔順。
(C) 國際太空站 ISS 上的人機介面
圖為歐空局人機互動實驗室所發展的輸入介面,該介面安裝在國際太空站ISS上,用於遠端控制地球上的機器人。除了圖形使用者介面和操縱桿外,太空人還有一個具有七個自由度的觸覺輸入設備,可以顯示機器人的交互力。
(D) DLR 機器人 Rollin' Justin 與周圍環境互動
人形機器人 Rollin’ Justin 與具有特定運動學的所謂鉸接物體進行互動。國際太空站上的太空人只需指揮機械手臂向上移動,機器人不僅能向上移動,而且由於靈活性的增強,還能自動圍繞物體的關節處做圓週運動。
(E) 搭載 CanSats 的火箭發射
自 2014 年起每年舉辦的 CanSat 競賽的亮點是發射活動,參賽隊伍的微型衛星(CanSat)將使用模型火箭發射到高達一公里的高度。
(F) DLR 機器人 Rollin' Justin 與周圍環境互動
人形機器人 Rollin’ Justin 與具有特定運動學的所謂鉸接物體進行互動。國際太空站上的太空人只需指揮機械手臂向上移動,機器人不僅能向上移動,而且由於靈活性的增強,還能自動圍繞物體的關節處做圓週運動。
(G) 對機器人來說很複雜的人類合作的可視化
人類合作的可視化展示了左邊的人如何透過旋轉運動來適應右邊的人的運動。左邊的人感受到了力量和運動,並做出了屈服的反應,而沒有推回到起始位置。該交互原理是已發布的柔性機器人控制的基礎。