2023 年 8 月 18 日
- 一組國際研究人員成功克服了航空業面臨的最大挑戰之一。
- 為此,他們使用複雜的控制系統積極抑制所謂的顫振現象。
- 該研究是歐盟資助的 FliPASED 項目的一部分,合作夥伴包括 DLR、SZTAKI、ONERA 和 TUM。
- 重點:航空、氣候友好型飛行
一個歐洲研究小組成功應對了航空領域的一項重大挑戰:他們藉助控制系統積極抑制了飛機結構的顫振現象。研究人員在特製無人機(UAV)的飛行測試中證明了這一點。
該團隊由位於哥廷根的DLR氣動彈性研究所、位於上普法芬霍芬的系統動力學和自動控制研究所、匈牙利計算機科學與控制研究所 (SZTAKI)、法國航空航天實驗室 (ONERA)和慕尼黑工業大學(TUM)組成)由地平線 2020:歐盟研究和創新計劃資助。此次成功的試飛是在德國航天中心位於科赫施泰特的國家無人駕駛航空系統測試中心進行的。
顫振作為一種現象
飛機設計中採用了輕量化技術,通過減少燃油消耗來減少碳足跡。更輕的飛機結構更靈活。這意味著它們在空氣動力載荷下會變形。材料和設計的改進趨勢將確保飛機變得更輕,從而進一步提高其靈活性。
這種結構變形和空氣動力學的相互作用被稱為氣動彈性。隨著靈活性的增加,飛機的結構動力學在其振動特性方面受到某些現象的影響。在某些條件下,飛機結構的振動與周圍氣流之間的相互作用可能會變得不穩定。這種眾所周知的氣動彈性現象稱為顫振,可能會因振動幅度的快速增加而導致災難性故障。因此,飛機結構的設計必須確保在正常運行速度期間絕不會發生顫振。隨著飛機結構變得更加輕,這一基本要求代表了重大限制。
飛行階段自適應航空伺服彈性飛機設計方法 (FliPASED) 項目的主要目標之一是使用主動方式抑制顫振:通過機載用戶界面、傳感器和智能控制算法。目的是找出主動顫振阻尼在減輕飛機重量時能在多大程度上帶來新的設計自由度。
為了實現這一目標,需要完成以下任務: 1. 開發精確靈活的飛機建模方法和工具, 2. 開發允許飛行速度高於設計撲動速度的控制算法,以及 3. 驗證所開發的工具和方法在安全且負擔得起的實驗測試平台上。
T-FLEX 和 P-FLEX 無人機
該無人機被稱為 T-FLEX,是之前歐洲研究項目——無顫振飛行包絡擴展 (FLEXOP) 的一部分。這種演示模型的基本原則是可以相對快速、安全地測試不同的技術。這只是改裝商用飛機成本的一小部分,而且不會對人的生命造成威脅。無人機的第二個版本 P-FLEX 用於測試主動顫振控制。作為飛行測試期間的附加安全裝置,安裝了由飛行員控制的顫振止動系統作為附加保障。
科赫施泰特的飛行測試
顫振飛行測試用於嚴格評估飛機的空氣動力穩定性。該飛機經過受控和系統的測試,以評估其在不同飛行條件下的性能。顫振測試是任何飛機認證的一個重要里程碑,因為它可以識別並減輕顫振風險。
飛行測試活動的目的是確認預測的所謂開環顫振速度(即不使用主動顫振控制器)。此外,還演示了兩個用於抑制超出該顫振率的主動滑塊。所有項目合作夥伴的團隊都參加了測試週。
飛行試驗程序
本週早些時候,氣動彈性模型已使用最新的地面振動測試數據進行了更新。基於這些模型,使用各種分析方法來驗證預期的顫振行為並儘可能準確地預測實際顫振速度。顫振機構包括傳統的屈扭聯軸器,預計該聯軸器在每秒 56 米的空速下會不穩定。接下來,該模型用於通過大量模擬來驗證控制器的飛行測試。
飛行試驗計劃是根據這些結果制定的。決定在恆定高度和不斷增加的空速下進行開環飛行試驗。飛機已準備好並使用自動駕駛儀,飛機能夠保持目標速度。以每秒 54 米的速度開環飛行測試的數據驅動操作模態分析 (OMA) 算法的結果證實了仿真模型預測的機翼彎曲和機翼扭轉對稱性之間存在耦合現象。抑制顫振臨界模式也被證明可以將氣動彈性阻尼降低到百分之一以下,這表明每秒 54 米的速度確實處於穩定飛行的邊緣。
飛過襟翼速度
下一步是測試主動顫振控制器。設計了兩種不同的主動顫振控制 - 結構化 H 無窮大控制和 H2 最優輸入輸出混合控制。決定對每個控制器進行飛行測試,在此期間飛機將以每秒 56 米的預測顫振速度飛行。機場、消防隊和 FliPASED 團隊已準備好承擔這種經過計算的風險,並製定了多個應急計劃,以防可能發生的故障。該飛機於 2023 年 5 月 26 日星期五上午 9:50 起飛。經檢查後,開啟主動顫振控制系統。然後飛機以顫振速度安全飛行。
還有一個更重要的問題:在每秒 56 米的速度下,飛機是否真的遭受了預期的破壞性顫振現象?然後決定在沒有控制器的情況下飛行超出預測的顫振速度。為此,再次設置了多個安全協議。由於天氣極其惡劣,飛機在飛行過程中速度比預期提前達到每秒56米時,飛機開始襟翼。最初安裝的用於引起顫振現象的位於後部的翼梁丟失了。最終的飛行測試證實,控制器工作得非常好,並且主動控制可以成為保護輕型飛機結構免受顫振不穩定影響的有效手段。
航空航天前景
飛行測試首次證明了在具有與商用飛機相似特性的無人機(UAV)上成功實現了主動飛行中顫振抑制。此外,它還具有所謂的技術準備水平,可以證明其對於下一代商用飛機的可行性。
儘管顫振是一種危險且不受歡迎的現象,但有關實際顫振現象的數據卻極其罕見。因此,FliPASED 項目不僅發布了飛行硬件和軟件工具的數據,展示了主動襟翼控制、模擬和實時預測,而且還提供了所有飛行測試的開源數據存儲庫,從而處於領先地位。目的是讓其他技術人員和研究人員有機會開發和驗證他們的工具和方法,從而在該研究領域取得進展。
[照片]
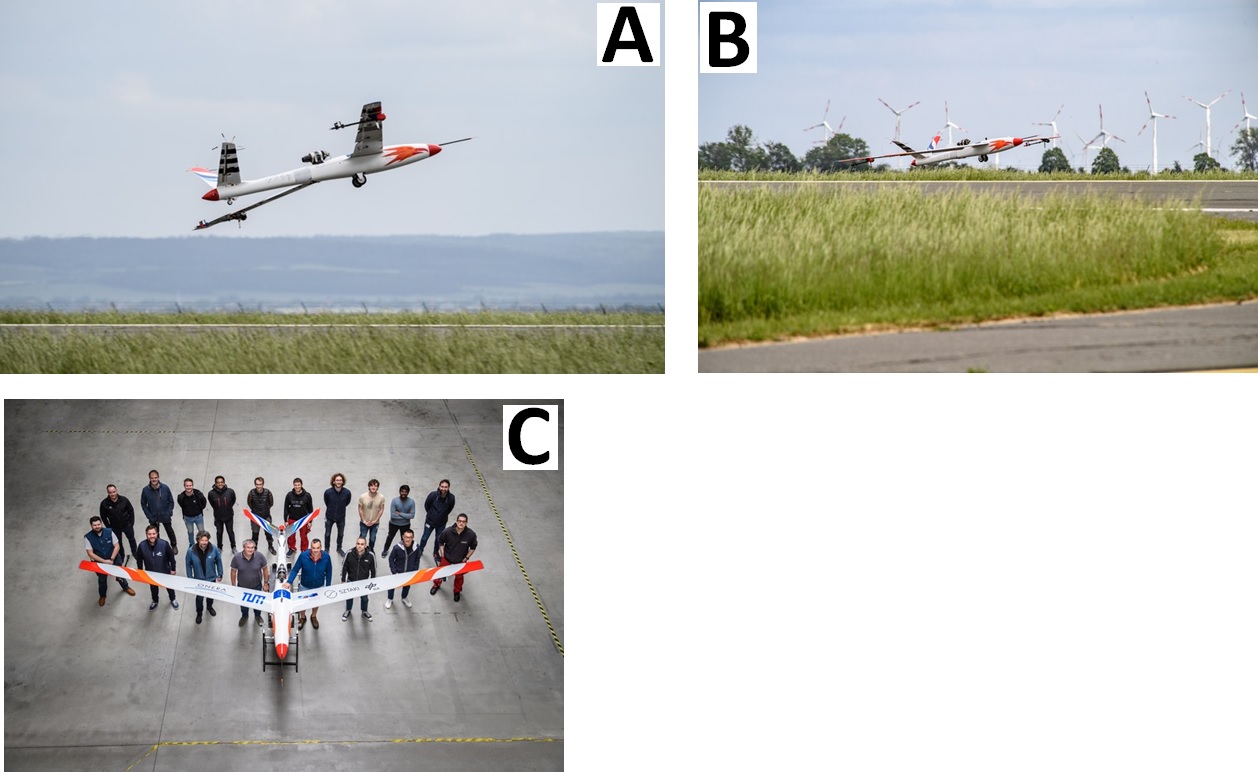
(A) 內置主動顫振抑制系統的無人機
一個國際研究團隊成功地應對了航空業面臨的最大挑戰之一:通過複雜的控制系統積極抑制可怕的顫振現象。
(B) 科赫施泰特的飛行測試
該團隊將無人機飛入沒有顫振抑制系統就無法到達的區域。飛行測試在德國航天中心位於科赫施泰特的國家無人駕駛航空系統測試中心進行。
(C) 來自三個國家的國際研究團隊
該研究是歐盟資助的 FLIPASED 項目的一部分,合作夥伴包括 DLR、SZTAKI、ONERA 和 TUM。