2023 年 9 月 13 日
- DLR 正在開髮用於港口維護的自主疏浚船的概念。
- 2023 年 9 月,DLR 科考船“Sally”在埃姆登港進行了現場測試。
- 測試了三個級別的自動化——船員導航、陸地遠程控制、全自動駕駛。
- 重點領域:運輸、海事研究、自主航運、港口維護
港口必須有一定的最小深度,以便船舶可以輕鬆使用。淤泥定期隨著潮汐通過船閘衝入港口並沉積在底部。疏浚船確保將沉積物從地面清除。德國航空航天中心 (DLR) 正在與其合作夥伴Niedersachsen Ports和MAREVAL進行研究,利用自動挖泥船使這一過程更加環保,同時提高生產效率。現場測試於 2023 年 9 月在埃姆登港進行。
埃姆登不會對沉降的淤泥進行疏浚,而是利用再循環過程將其吸入並短暫暴露在大氣中的氧氣中。回到水中,沉積物保持懸浮狀態,船隻可以穿過這些懸浮顆粒航行。為了防止淤泥顆粒重新沉降到港底,挖泥船需要連續、系統地行駛通過所有港池。
新船、新運營理念
AMISIA項目的目的不僅是研究自主挖泥船,而且是合適的操作概念。AMISIA 代表“先進港口維護:智能、可持續、創新和自動化疏浚”。DLR研究船“Sally”用於調查。它非常機動,可以原地轉向,並且完全由電池供電。
“該項目特別令人興奮,因為在常規操作中高度自動化的水上駕駛幾乎不存在,”負責該項目測試設計和數據評估的DLR 未來移動系統工程研究所 “挖泥船面臨的一個特殊挑戰是在港口環境中安全航行,港口環境不斷變化,例如由於船舶停泊而變化。因此,我們正在研究一種傳感器概念,能夠在這些難以估量的區域實現安全、自動導航。我們還在努力提供援助,以避免與港口基礎設施發生碰撞。”
通過傳感器和攝像頭可以看到一切
莎莉身上裝有傳感器和攝像頭,可以監視周圍的環境。移動的船隻或到碼頭牆的距離可以通過這種方式記錄。Sally還配備了各種輔助系統,例如防撞傳感器、自動駕駛儀和物體識別系統。輔助系統旨在承擔大多數導航任務。為了進行測試,莎莉配備了市售的遙控器。在這裡,研究人員希望測試該系統的局限性以及未來在疏浚船上的批准。
通過端口遠程控制自主
科學家們在埃姆登測試了三個級別的自動化。在第一階段,德國航天中心員工在船上控制該船。在第二個例子中,一名研究人員通過一個改裝成船橋的集裝箱遠程控制了這艘船。在第三階段,船舶應實現自動化,使其能夠對出現的任何問題獨立做出反應。莎莉已經能夠自動保持在軌道上並避開障礙物。出於安全考慮,障礙物僅在系統中進行模擬。每個階段都有另一個人在船上,這樣如果出現問題,他們可以隨時進行干預。
新安裝的雷達傳感器的數據及其生成的點雲將在接下來的幾個月內得到更詳細的檢查。研究人員希望即使在困難的環境條件下也能夠檢測到前方意想不到的障礙物或船隻。測試結果將被納入自主挖泥船的最終設計和操作概念中。參與該項目的人員將於 2024 年秋季展示這一成果。
對環境更好
此外,AMISIA 的概念設想了一種替代船舶推進系統,以便在未來維護浮動挖掘機時減少二氧化碳排放。驅動替代方案的選擇範圍從氫氣和合成甲烷到甲醇,再到由內燃機和電池動力組成的混合解決方案(即所謂的混合驅動)。但也可以考慮全電動驅動。
[照片]
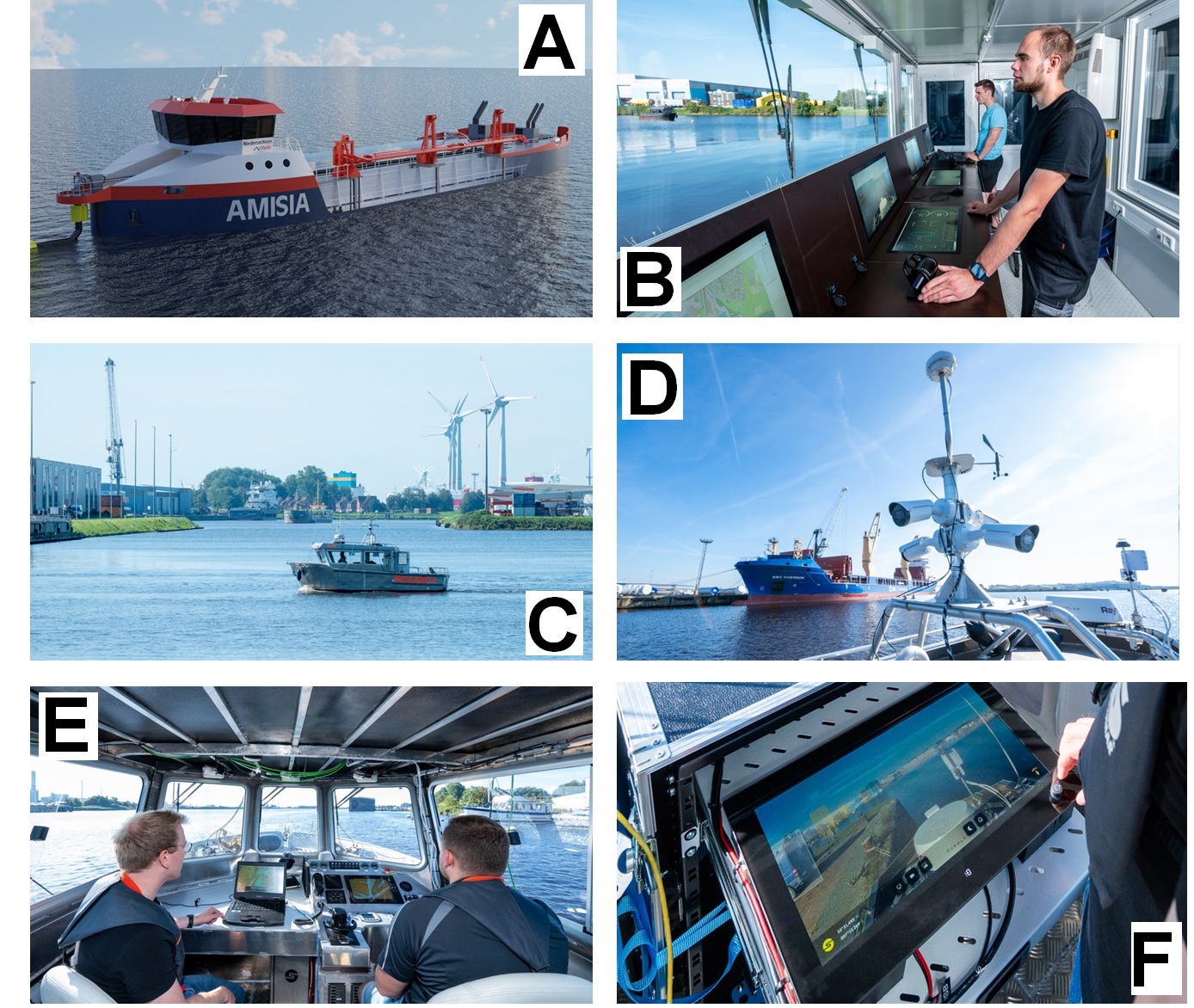
(A) 自主挖泥船的願景
在 AMISIA 項目中,德國航天中心正在研究自主挖泥船的概念。這樣做的目的是利用再循環過程使淤泥保持懸浮狀態,以便船舶可以通過港口。
(B) 研究人員從陸地控制這艘船
科學家們研究了埃姆登港將集裝箱改裝成船橋的船舶導航的三個自動化水平。
(C) 德國航天中心研究船“莎莉”號停泊在埃姆登港
薩莉配備了攝像頭、傳感器和輔助系統,正在埃姆登港的水面上測試自動駕駛。
(D) 攝像頭提供港口環境概覽
DLR 研究船“Sally”上的傳感器為輔助系統提供自動導航數據。
(E) 船上船員可隨時干預航行
在埃姆登港 AMISIA 項目的現場測試期間,出於安全原因,每個自動化級別的人員都在船上。
(F) Sally 船上的物體檢測
碼頭牆、其他船隻或其他物體等障礙物可以顯示在監視器上。